4.3 Аэродинамическая сила крыла
 Данный силовой элемент используется для задания аэродинамических сил, действующих на одно звено, имеющее форму крыла.
Данный силовой элемент используется для задания аэродинамических сил, действующих на одно звено, имеющее форму крыла.При формировании силового элемента задается базовый узел Node. Центр узла Node находится на базовой оси крыла. Обычно базовой осью крыла является линия четверти хорд или линия середины хорд. Это объясняется тем, что центр аэродинамического давления, как правило, находится на линии четверти хорд для дозвуковой скорости и с увеличением скорости до сверхзвуковой перемещается на линию середины хорд. Вектор Z базового узла направлен по базовой оси крыла. Вектора X и Z базового узла задают плоскость крыла. Для расчетов создается копия базового узла Node*, которая прикрепляется к звену. Схематический вид силового элемента представлен на Рис. 4.
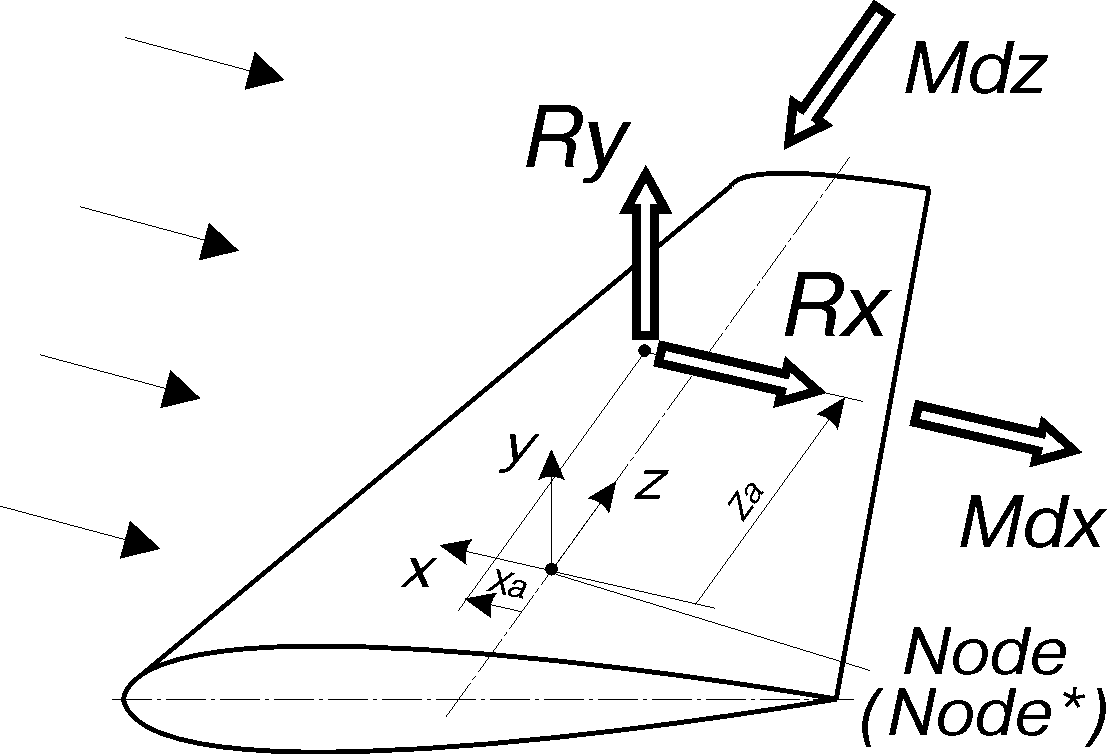
Рис. 4. Аэродинамическая сила крыла
Продольная аэродинамическая сила Rx направлена вдоль вектора X узла Node*. Нормальная аэродинамическая сила Ry направлена вдоль вектора Y узла Node*. Аэродинамическая сила вдоль вектора Z узла Node* принимается равной нулю. Демпфирующий момент Mdx направлен вдоль вектора Х узла Node*. Демпфирующий момент Mdz направлен вдоль вектора Z узла Node*. Демпфирующий момент вокруг вектора Y узла Node* принимается равным нулю. Значения аэродинамических сил и демпфирующих моментов определяются на основании характеристик среды, заданных коэффициентов аэродинамических сил и производных коэффициентов демпфирующих моментов. Точка приложения аэродинамических сил называется центром аэродинамического давления. Координаты центра аэродинамического давления Xa и Za определяются на основании заданных функций смещения от центра узла Node*.
Коэффициенты аэродинамических сил и производные коэффициентов демпфирующих моментов задаются в виде функций, зависящих от угла атаки  и числа М движения. Угол атаки может изменяться в интервале от -180 до 180°. Угол скольжения
и числа М движения. Угол атаки может изменяться в интервале от -180 до 180°. Угол скольжения  может изменяться в интервале от -90 до 90°. В силовом элементе используются коэффициенты аэродинамических сил и производные коэффициентов демпфирующих моментов в системе координат, связанной со звеном.
может изменяться в интервале от -90 до 90°. В силовом элементе используются коэффициенты аэродинамических сил и производные коэффициентов демпфирующих моментов в системе координат, связанной со звеном.
Пользователь может задать датчики, от значений которых зависят функции аэродинамических коэффициентов в дополнение к зависимости от угла атаки и числа  движения.
движения.
Синтаксис метода создания
aerodynamics3(Flow, Body, Node, Sa, L, flagS, fCx, fCy, fXa, fZa, fMdx, fMdz, list(Sensor1, …), pointFlow=…, work=…, color=…, visible=…)
Обязательные позиционные параметры метода
medium Flow
Среда, которая воздействует на звено.
body Body
Имя звена, на которое действует аэродинамическая сила.
node Node
Исходный базовый узел расчета аэродинамического воздействия. Копия этого узла Node* прикрепляется к звену и используется для расчета аэродинамической силы.
scalar Sa [length2]
Аэродинамическая площадь, относительно которой определены коэффициенты аэродинамических сил и производные коэффициентов демпфирующих моментов.
scalar L [length]
Характерный линейный размер, относительно которого определены смещения центра аэродинамического давления и производные коэффициентов демпфирующих моментов.
flagS = [aeroSymmetrical:/noAeroSymmetrical:]
Параметр определяет симметрию аэродинамических характеристик относительно значений угла атаки .
 flagS = aeroSymmetrical:
flagS = aeroSymmetrical:Аэродинамические характеристики симметричны относительно значений угла атаки . В этом случае функции аэродинамических коэффициентов задаются для угла атаки в интервале от 0 до 180°.
 flagS = noAeroSymmetrical:
flagS = noAeroSymmetrical:Симметрия аэродинамических характеристик относительно значений угла атаки отсутствует. В этом случае функции аэродинамических коэффициентов задаются для полного интервала возможных значений угла атаки от -180 до 180°.
function fCx [-]<[angle], [-], …>
Функция коэффициента продольной аэродинамической силы, направленной вдоль вектора X узла Node*. Положительное значение коэффициента соответствует продольной силе, направленной в сторону, противоположную вектору X узла Node*. Функция зависит от угла атаки и числа движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
function fCy [-]<[angle], [-], …>
Функция коэффициента нормальной аэродинамической силы, направленной вдоль вектора Y узла Node*. Функция зависит от угла атаки и числа движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
function fXa [-]<[angle], [-], …>
Функция относительного смещения центра аэродинамического давления от центра узла Node* по его вектору X. Функция зависит от угла атаки и числа движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
function fZa [-]<[angle], [-], …>
Функция относительного смещения центра аэродинамического давления от центра узла Node* по его вектору Z. Функция зависит от угла атаки и числа движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
function fMdx [1/ angle]<[angle], [-], ...>
Функция производной коэффициента демпфирующего момента вокруг вектора Х, направленного вдоль вектора Х узла Node*. Функция должна быть отрицательной. Это соответствует направлению демпфирующего момента в сторону, противоположную проекции вектора угловой скорости звена на вектор Х узла Node*. Функция зависит от угла атаки и числа движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
function fMdz [1/ angle]<[angle], [-], ...>
Функция производной коэффициента демпфирующего момента вокруг вектора Z, направленного вдоль вектора Z узла Node*. Функция должна быть отрицательной. Это соответствует направлению демпфирующего момента в сторону, противоположную проекции вектора угловой скорости звена на вектор Z узла Node*. Функция зависит от угла атаки и числа движения. Она также может зависеть от значений датчиков, задаваемых пользователем.
list(sensor Sensor1, …)
Список датчиков, от значений которых зависят функции fCx, fCy, fXa, fZa, fMdx, и fMdz в дополнение к зависимости от угла атаки и числа движения.
Необязательные именованные параметры метода
Точка определения параметров взаимодействия звена со средой. Копия этой точки pointFlow* прикрепляется к звену. По умолчанию эти параметры определяются в центре узла Node*.
Параметры являются общими для всех методов создания силовых элементов и описаны в пункте «Необязательные именованные параметры всех методов создания» общей части раздела «Силовой элемент (force)» главы «Основные объекты» книги «Описание объектов многокомпонентной механической системы».
Внутренние системные объекты
sensor alpha [angle]
Угол атаки – угол между вектором X узла Node* и проекцией вектора скорости звена относительно среды в точке pointFlow*, если она задана, на плоскость XY узла Node*. Иначе, в центре узла Node*.
sensor beta [angle]
Угол скольжения – угол между вектором скорости звена относительно среды в точке pointFlow*, если она задана, и плоскостью XY узла Node*. Иначе, в центре узла Node*.
sensor velocity [length/time]
Скорость звена относительно среды в точке pointFlow*, если она задана. Иначе в центре узла Node*.
sensor Mach [-]
Число движения в точке pointFlow*, если она задана. Иначе в центре узла Node*. Число равно отношению скорости звена относительно среды к скорости звука в ней.
Описание
При расчете силового элемента в каждый момент времени определяются центр аэродинамического давления и следующие параметры взаимодействия звена со средой:
Все параметры взаимодействия звена со средой определяются в точке pointFlow*, если она задана. Иначе, в центре узла Node*. Проекции угловой скорости  и
и  определяются как угловые скорости звена относительно базового узла среды.
определяются как угловые скорости звена относительно базового узла среды.
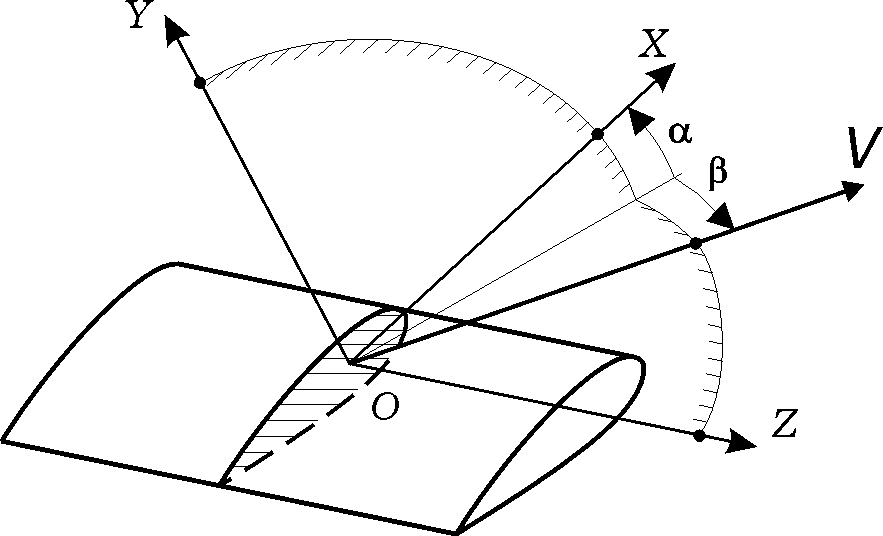
Рис. 5. Углы атаки  и скольжения
и скольжения
Координаты центра аэродинамического давления звена в системе координат узла Node* определяются следующим образом:
при flagS = aeroSymmetrical:
при flagS = noAeroSymmetrical:
где  ,
,  – заданные функции относительных смещений координат центра аэродинамического давления по векторам X и Z узла Node*;
– заданные функции относительных смещений координат центра аэродинамического давления по векторам X и Z узла Node*;  – значения заданных датчиков, от которых зависят функции
– значения заданных датчиков, от которых зависят функции  ,
,  , , ,
, , ,  и
и  в дополнение к зависимости от угла атаки и числа движения;
в дополнение к зависимости от угла атаки и числа движения;  – характерный линейный размер.
– характерный линейный размер.
Далее определяются значения аэродинамических коэффициентов.
Коэффициент продольной аэродинамической силы
при flagS = aeroSymmetrical:
при flagS = noAeroSymmetrical:
где – заданная функция коэффициента продольной аэродинамической силы.
Коэффициент нормальной аэродинамической силы
при flagS = aeroSymmetrical:
при flagS = noAeroSymmetrical:
где – заданная функция коэффициента нормальной аэродинамической силы.
Производная коэффициента демпфирующего момента вокруг вектора Х узла Node*
при flagS = aeroSymmetrical:
при flagS = noAeroSymmetrical:
где – заданная функция производной коэффициента демпфирующего момента вокруг вектора Х узла Node*.
Производная коэффициента демпфирующего момента вокруг вектора Z узла Node*
при flagS = aeroSymmetrical:
при flagS = noAeroSymmetrical:
где – заданная функция производной коэффициента демпфирующего момента вокруг вектора Z узла Node*.
Число аргументов в функциях , , , , и не должно превышать числа заданных датчиков в списке плюс два. Первый аргумент функций соответствует углу атаки
Скорость звена, движущегося относительно среды с углом скольжения , можно разложить на две составляющие  и
и  . Составляющая скорости нормальная к базовой оси крыла определяет значения продольной и нормальной аэродинамических сил. Составляющая скорости вдоль базовой оси крыла не создает аэродинамических сил. Значение поперечной аэродинамической силы принимается равным нулю, поскольку рабочие углы скольжения , как правило, малы.
. Составляющая скорости нормальная к базовой оси крыла определяет значения продольной и нормальной аэродинамических сил. Составляющая скорости вдоль базовой оси крыла не создает аэродинамических сил. Значение поперечной аэродинамической силы принимается равным нулю, поскольку рабочие углы скольжения , как правило, малы.
Продольная, нормальная аэродинамические силы и демпфирующие моменты приложены к звену Body в центре аэродинамического давления.
Значение продольной аэродинамической силы, действующей на звено Body, равно
где  – скоростной напор, обусловленный нормальной составляющей скорости потока ;
– скоростной напор, обусловленный нормальной составляющей скорости потока ;  – заданная аэродинамическая площадь, относительно которой определены коэффициенты аэродинамических сил.
– заданная аэродинамическая площадь, относительно которой определены коэффициенты аэродинамических сил.
Положительное значение продольной силы  соответствует направлению, противоположному вектору X узла Node*.
соответствует направлению, противоположному вектору X узла Node*.
Значение нормальной аэродинамической силы, действующей на звено Body, равно
Положительное значение нормальной силы  соответствует направлению вектора Y узла Node*.
соответствует направлению вектора Y узла Node*.
Значение демпфирующего момента вокруг вектора Х узла Node* равно
Момент  направлен в сторону, противоположную вектору проекции угловой скорости звена.
направлен в сторону, противоположную вектору проекции угловой скорости звена.
Значение демпфирующего момента вокруг вектора Z узла Node* равно
Момент  направлен в сторону, противоположную вектору проекции угловой скорости звена.
направлен в сторону, противоположную вектору проекции угловой скорости звена.