4.2.10 Пара передачи вращения
 Шарнир соединяет два звена и имеет пять степеней свободы. Общий вид шарнира представлен на Рис. 83. Этот шарнир моделирует передачу вращения с равными угловыми скоростями между двумя звеньями. При этом шарнир допускает произвольное поступательное движение в пространстве второго звена относительно первого. Оси передачи вращения шарнира заданы точками Point1 и Point2, а также векторами Vector1 и Vector2. В модели используются копии этих объектов Point1*, Point2*, Vector1* и Vector2*. Точка Point1* и вектор Vector1* прикрепляются к первому звену. Точка Point2* и вектор Vector2* прикрепляется ко второму звену.
Шарнир соединяет два звена и имеет пять степеней свободы. Общий вид шарнира представлен на Рис. 83. Этот шарнир моделирует передачу вращения с равными угловыми скоростями между двумя звеньями. При этом шарнир допускает произвольное поступательное движение в пространстве второго звена относительно первого. Оси передачи вращения шарнира заданы точками Point1 и Point2, а также векторами Vector1 и Vector2. В модели используются копии этих объектов Point1*, Point2*, Vector1* и Vector2*. Точка Point1* и вектор Vector1* прикрепляются к первому звену. Точка Point2* и вектор Vector2* прикрепляется ко второму звену.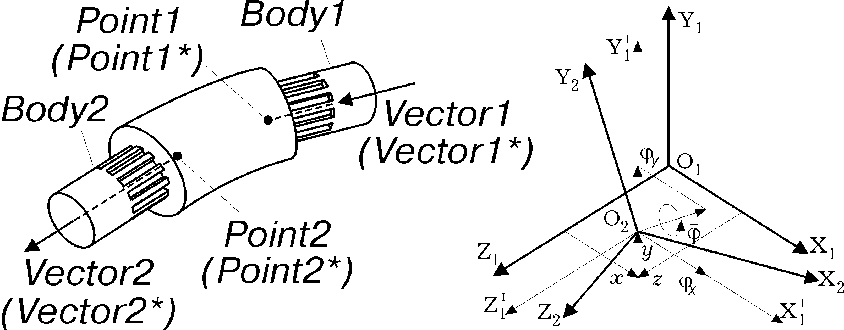
Рис. 83. Пара передачи вращения
Синтаксис метода создания
rotTransfer(Body1, Body2, Point1, Vector1, Point2, Vector2, freeze=..., work=..., color=..., visible=...)
Обязательные позиционные параметры метода
body Body1
Имя первого звена шарнира.
body Body2
Имя второго звена шарнира.
point Point1
Исходная точка, задающая точку оси передачи вращения первого звена. Копия этой точки Point1* прикрепляется к первому звену. Точка Point1* задает точку оси передачи вращения первого звена в процессе движения исследуемого механизма.
vector Vector1
Исходный вектор, задающий направление оси передачи вращения первого звена. Копия этого вектора Vector1* прикрепляется к первому звену. Вектор Vector1* задает направление передачи вращения первого звена в процессе движения исследуемого механизма.
point Point2
Исходная точка, задающая точку оси передачи вращения второго звена. Копия этой точки Point2* прикрепляется ко второму звену. Точка Point2* задает точку оси передачи вращения второго звена в процессе движения исследуемого механизма.
vector Vector2
Исходный вектор, задающий направление оси передачи вращения второго звена. Копия этого вектора Vector2* прикрепляется ко второму звену. Вектор Vector2* задает направление передачи вращения второго звена в процессе движения исследуемого механизма.
Необязательные именованные параметры метода
Параметры являются общими для всех методов создания шарниров и описаны в пункте «Необязательные именованные параметры всех методов создания» общей части раздела «Шарнир (joint)» главы «Основные объекты».
Описание
При переводе проекта из режима редактирования в режим исследования в шарнире производятся следующие действия.
1. Создается узел O1X1Y1Z1 (см. Рис. 83), который прикрепляется к звену Body1. Центр этого узла O1 совпадает с точкой Point*. Ось Z1 совпадает с вектором Vector1*.
2. Создается узел O2X2Y2Z2 (см. Рис. 83), который прикрепляется к звену Body2. Центр этого узла O2 совпадает с точкой Point*. Ось Z2 совпадает с вектором Vector2*.
Внутренние системные объекты
sensor x [length], sensor y [length], sensor z [length]
Координаты центра узла привязки  ,
,  ,
,  второго звена шарнира в системе координат узла привязки первого звена (см. Рис. 83.).
второго звена шарнира в системе координат узла привязки первого звена (см. Рис. 83.).
sensor fiX [angle], sensor fiY [angle]
Приведенные параметры Эйлера  и
и  , определяют поворот узла второго звена шарнира относительно узла первого звена (см. Рис. 83.).
, определяют поворот узла второго звена шарнира относительно узла первого звена (см. Рис. 83.).